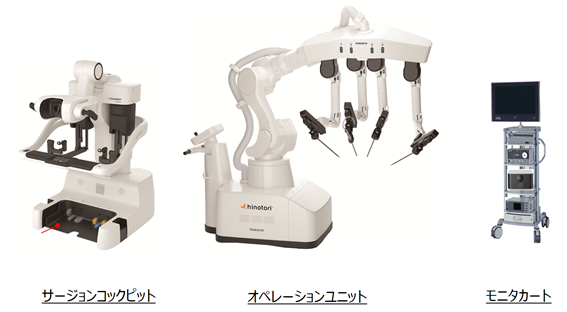
hinotori™についてhinotori™の紹介
株式会社メディカロイドについて
メディカロイドは、2013年、産業用ロボットのリーディングカンパニーである川崎重工業株式会社と、検査・診断の技術を保有し、医療分野に幅広いネットワークを持つシスメックス株式会社の共同出資により設立されました。川崎重工業の産業用ロボット技術、シスメックスの医療分野で培われた知見を掛け合わせることにより、新しい価値を皆様に提供いたします。

hinotori™ サージカルロボットシステムについて
hinotori™は手術に求められる術者の微細な動きを実現する手術支援ロボットとして開発されました。それを可能にしたのは、川崎重工業の50年以上の歴史を持つロボット技術と、シスメックスの医療分野におけるネットワークおよび知見です。メディカロイドはオープンプラットフォーム体制で、新たな機能とサービスの開発を継続的におこない、患者様にやさしい低侵襲手術を実現します。
Copyright © Medicaroid Corporation All Rights Reserved. © Tezuka Productions
hinotori™の特徴について
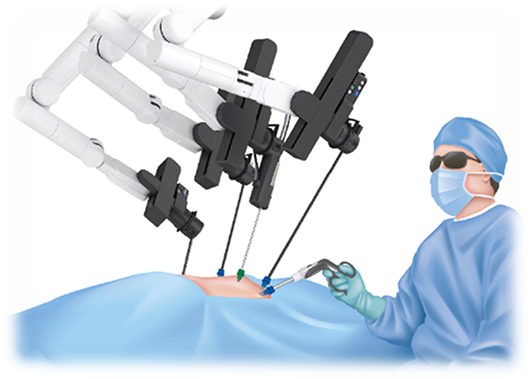
広い清潔野周辺の操作スペース
独自のデザインで、オペレーションアームをコンパクトにセッティングできることにより、清潔野の医師の操作スペースを広く取ることができ、医師の操作性向上につながります。

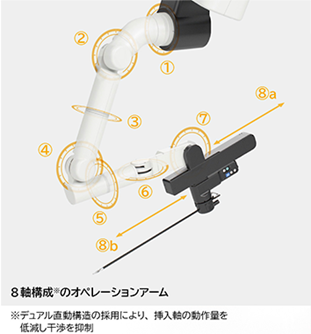
人の腕のスマートな動きを追求
8軸で構成されているオペレーションアームは、人の腕のようになめらかに動き、アーム同士、清潔野の医師とアームの干渉を軽減し、手術をスムーズに進めることに貢献します。
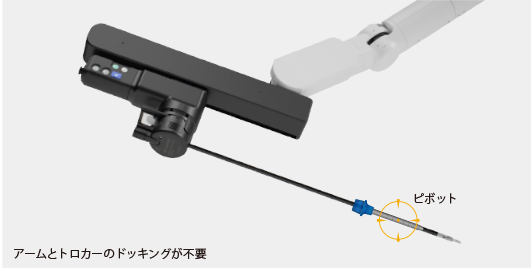
ドッキングフリーデザイン(ソフトウェアによるインストゥルメント動作支点の設定)
インストゥルメントの動作支点となる“ピボット”はソフトウェアによって設定されるため、アームとトロカーのドッキングが不要、トロカー周りがすっきりとします。
高精細なフルハイビジョン3Ⅾ画像
組織の微細構造の視認により安全な操作が可能になります。
多様な操作姿勢に合わせるエルゴノミクスデザイン
サージョンコックピットは、エルゴノミクスデザイン(人間工学に基づいた設計)により術者の負担を軽減します。
